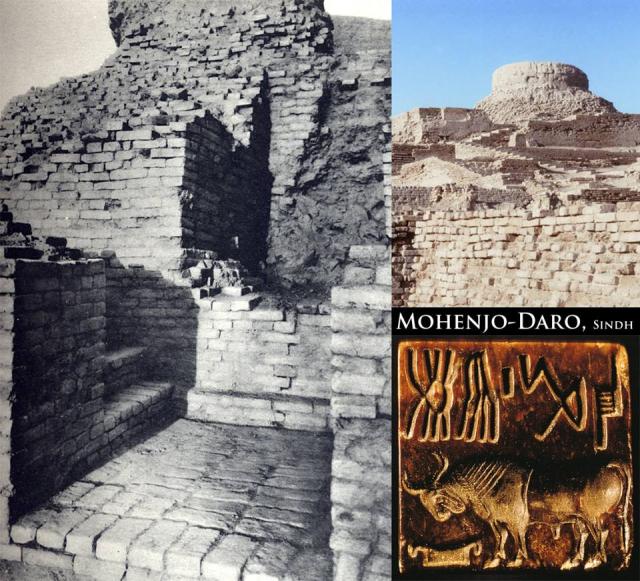
Image niche and stairway to left ascending to platform of stupa at Mohenjo-daro, modern shot and Bison Seal (ca. 2500 BCE). "This image niche is 7 feet deep by 4 ft. 6 inches wide, and occupies a particularly prominent position, being directly opposite to, though slightly above, the approaching stairway. In it Mr. Banerji found some remains of a statue of Buddah, seated cross-legged, probably on a lotus throne. The core of the image, he says, was of brick covered with a coating of mud, which had originally been painted or gilt." (John Marshall, Mohenjo-daro, I, p. 115). Of course, this is from a later Buddhist age at Mohenjo-daro, but one wonders about the way the holy places of one religion are often built on those of another.
